NodeREDの使用方法
ダッシュボードへの接続
- 前の手順で取得したIPを、ウェブブラウザ(Google Chrome推奨)に以下の形式で入力します:
Raspberry Pi のIP:1880
例:192.168.2.61:1880
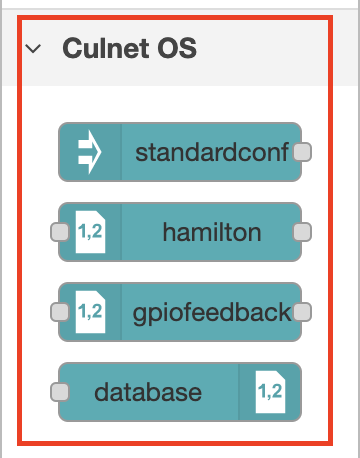
- NodeREDのダッシュボードが表示され、左側ののノード一覧に
Culnet OSタブとノードリストが表示されます。
サンプルテンプレートの読み込み
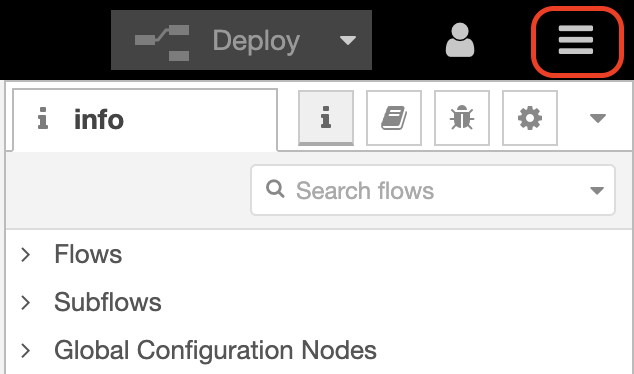
- ダッシュボードの右上にあるメニューアイコンをクリックします。
Import、次にExamplesをクリックします。- Examplesタブで、
node-red-culnetv2のドロップダウンを見つけます。 readdoを選択し、Importをクリックします。- ノードをクリックして配置します。
- フローは次のようになります
各ノードの設定
最初のノード: standardconf
このノードはフローを開始するトリガーノードです。このノードの内容は現時点では使用されていないため、設定は必要ありません。
2番目のノード: modbus
このノードはシリアルポートを介してDOセンサーと通信します。読み取りが完了すると、データがmsg.payloadに送信されます。
- Modbusノードをクリックして設定パネルを表示します。
- 以下のように入力し、
Doneをクリックします。
| 名前 | 値 |
|---|---|
| Port | /dev/ttyUSB0 |
| Device ID | 1 |
| Baud Rate | 19200 |
| Register | 2089 |
| Read Length | 10 |
| Stop Bits | 2 |
| Parity | none |
読み取りレジスタが2089に設定されていますが、2090から読み取られます。
Hamilton DO ArcセンサーのModbusプロトコルの詳細は、こちらで確認できます。
3番目のノード: hamilton
このノードは、modbusノードから受け取ったデータを変換し、msg.sensors内のオブジェクトに格納された小数点数の値を返します。
- Hamiltonノードをクリックして設定パネルを表示します。
- センサー名を入力し、センサーの入力タイプとして
DOを選択し、Doneをクリックします。
4番目のノード: debug
このノードはNodeRED標準搭載ノードの一部で、上流のノードからのメッセージを表示するためのものです。
- デバッグノードをクリックして設定パネルを表示します。
Outputがcomplete msg objectに設定されていることを確認し、ToではDebug Windowがチェックされていることを確認します。Doneをクリックします。
フローの保存
すべてのノードを設定したら、フローを保存します。右上隅にある Deploy をクリックします。
フローの実行
フローの設定が完了したら、実行する準備が整いました。
デバッグパネルの表示
実行する前に、出力を確認するために Debug パネルを開く必要があります。右上のメニューにある虫のアイコンをクリックください。
フローの開始
standardconf ノードのボタンをクリックします。
結果の確認
デバッグパネルに新しいメッセージが表示されます。sensorsとセンサー名のオブジェクトを展開して結果を確認してください。
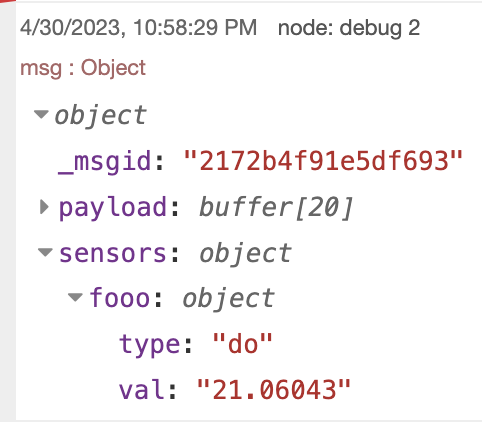
上記のような表示があれば成功です! 🎉